Architecture
Overview of Scenario Execution
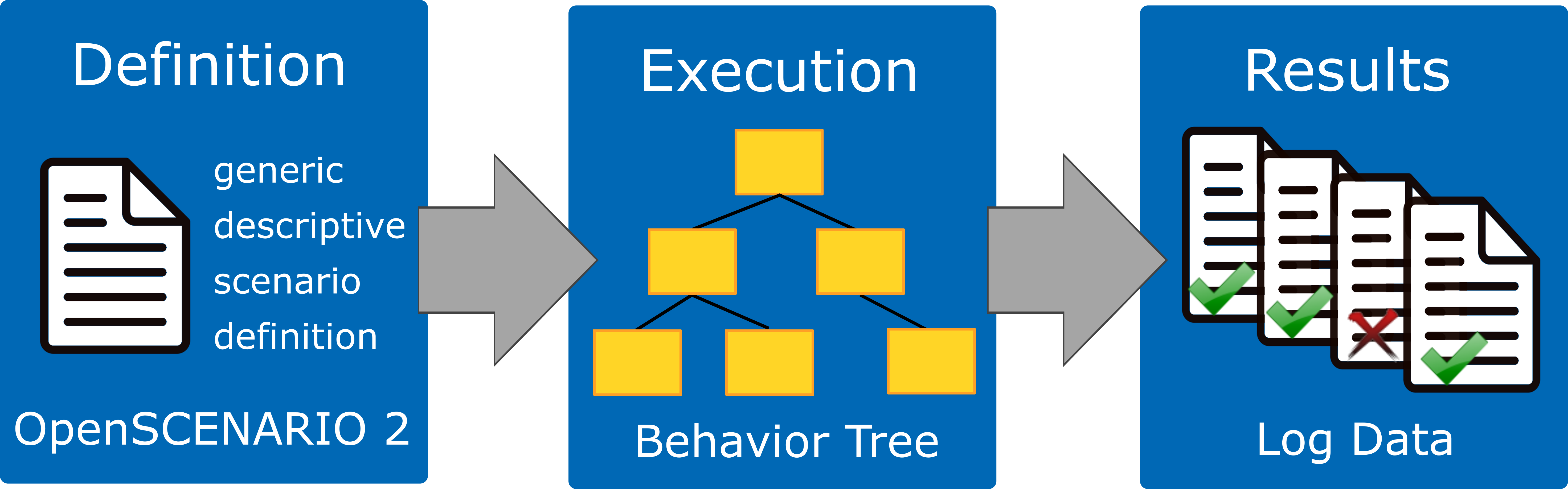
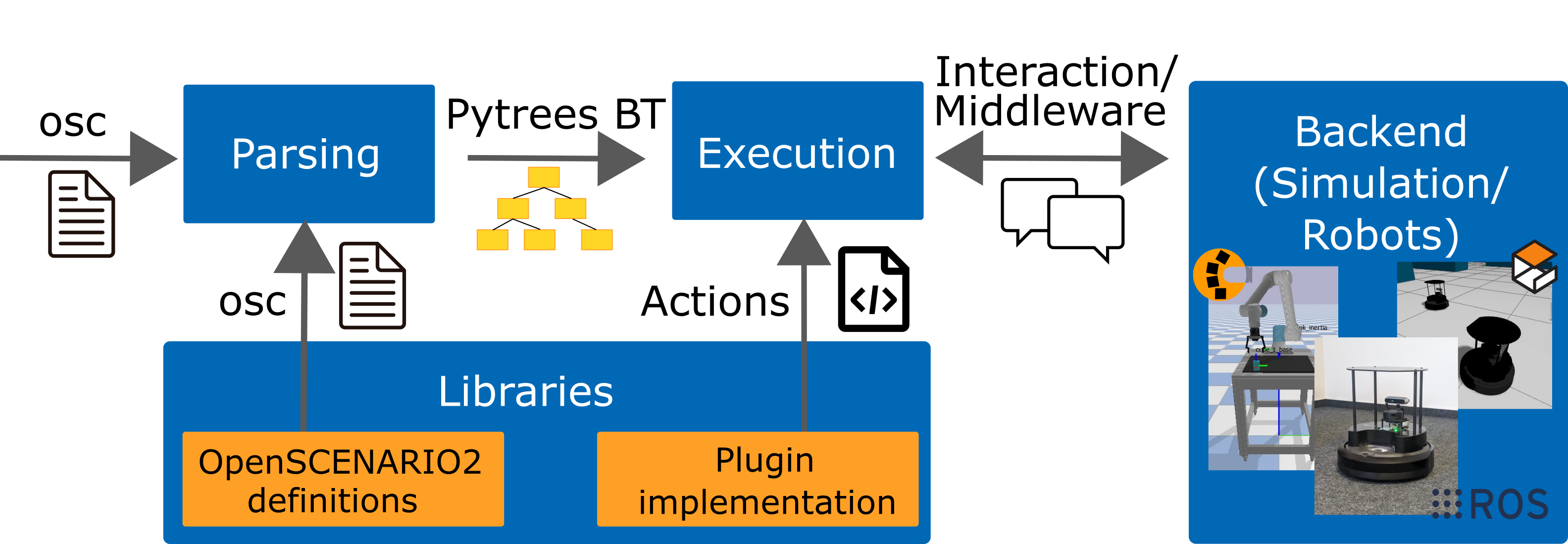
Scenario execution is built as a Python library on top of two open-source components: the generic scenario description language OpenSCENARIO DSL and PyTrees. In general, the user defines a scenario in the OpenSCENARIO DSL language, scenario execution parses the scenario, translates it to a behavior tree, executes it and finally gathers the test results.
Architecture of Scenario Execution
Our implementation is highly modular separating the core components from simulation- and/or middleware-specific modules realized through a plugin-based approach. In principle, any additional feature that is required by a specific scenario and that can be implemented in Python could be realized as additional library. A library typically provides an OpenSCENARIO DSL file with additional definitions and may provide code implementing additional functionality such as conditions or actions.
Currently, the following sub-packages and libraries are available:
Design for Modularity
Scenario execution is designed to be easily extensible through libraries. An example is available here: Create Scenario Library.
The entry points are defined like this:
entry_points={
'scenario_execution.actions': [
'custom_action = example_library.custom_action:CustomAction',
],
'scenario_execution.osc_libraries': [
'example = example_library.get_osc_library:get_example_library',
]
}
Scenario Parsing
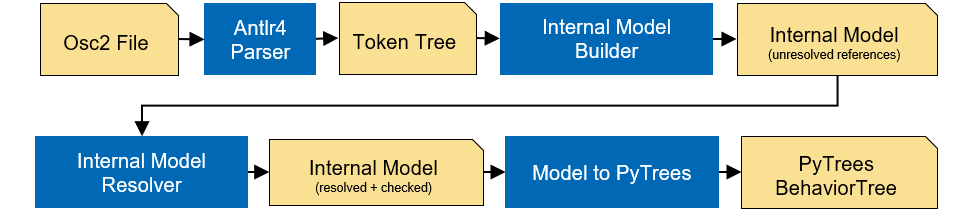
Architecture of Scenario Parsing
The Internal Model Builder, implemented as a Model Listener does an initial check of the model by checking for supported language features. The Internal Model Resolver, implemented as a Model Visitor is used for type/variable resolving and does an in depth consistency check of the model.
Modules
scenario_execution: The base package for scenario execution. It provides the parsing of OpenSCENARIO DSL files and the conversion to py-trees. It's middleware agnostic and can therefore be used as a basis for more specific implementations (e.g. ROS). It also provides basic OpenSCENARIO DSL libraries and actions.scenario_execution_ros: This package usesscenario_executionas a basis and implements a ROS2 version of scenario execution. It provides a OpenSCENARIO DSL library with basic ROS2-related actions like publishing on a topic or calling a service.scenario_execution_control: Provides code to control scenario execution (in ROS2) from another application such as RViz.scenario_execution_coverage: Provides tools to generate concrete scenarios from abstract OpenSCENARIO DSL scenario definition and execute them.scenario_execution_gazebo: Provides a Gazebo-specific OpenSCENARIO DSL library with actions.scenario_execution_interfaces: Provides ROS2 interfaces, more specifically, messages and services, which are used to interface ROS2 with thescenario_execution_controlpackage.scenario_execution_rviz: Contains several rviz plugins for visualizing and controlling scenarios when working with ROS2.simulation/gazebo_tf_publisher: Publish ground truth transforms from simulation within TF.simulation/tb4_sim_scenario: Run Turtlebot4 within simulation, controlled by scenario execution.tools/message_modification: ROS2 nodes to modify messages.tools/scenario_status: Publish the current scenario status on a topic (e.g. to be capture within a ROS bag).